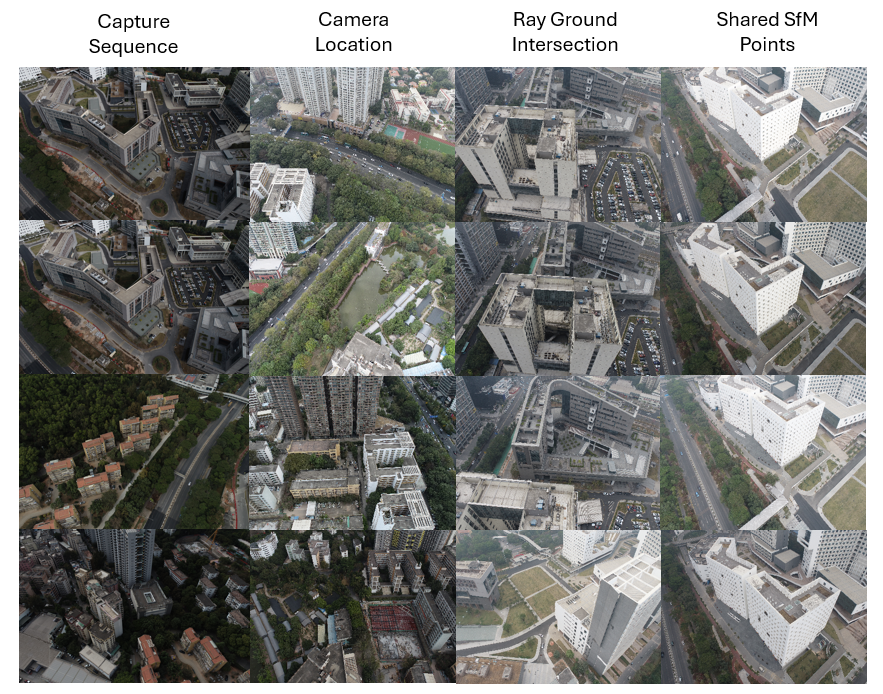
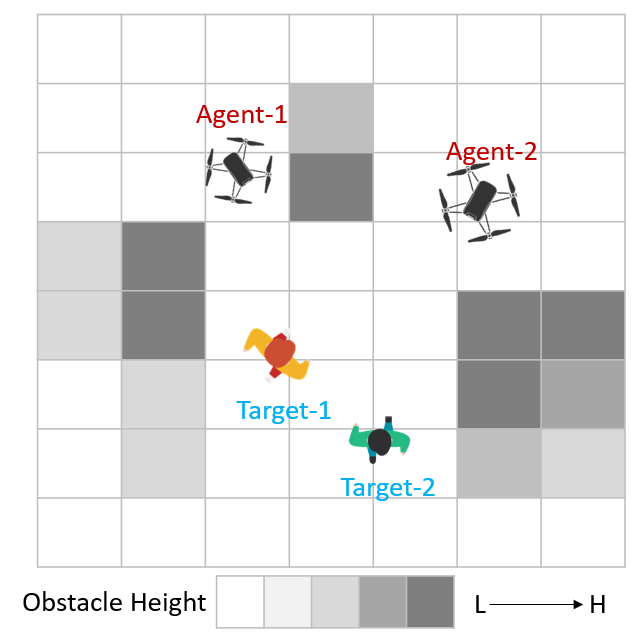
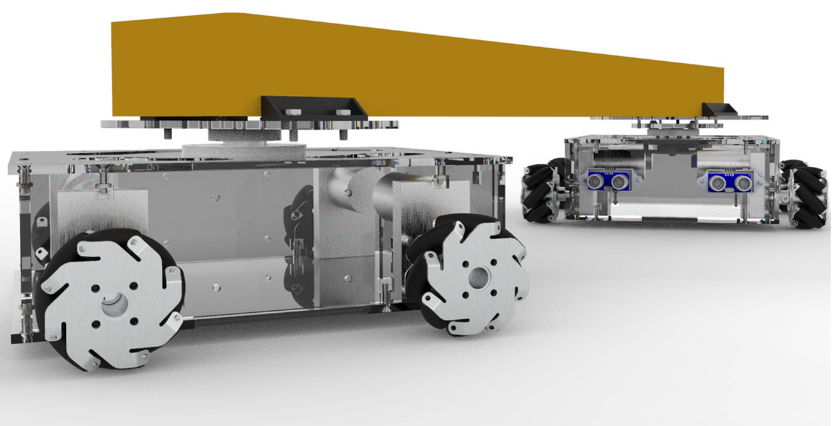
perception/vision Active vision for Next Best View Planning in outdoor scenes. Uncertainity guided next best view prediction in outdoor scene settings Aug3D: Augmenting large scale outdoor datasets for Generalizable Novel View Synthesis Making existing pre-trained generalizable NVS models like PixelNeRF suitable for Large Scale Outdoor Scenes. autonomy Learning to select multi-viewpoints for Filming Dynamic Targets We use SARSA and Q-Learning to safely select viewpoints over a trajectory to capture most informative poses across multiple views to maximize pixel coverage over moving targets. MeWBots: Mecanum-Wheeled Robots for Collaborative Manipulation Team of robots collaborating with each other to move the payload in an Obstacle-Clustered Environment Without Communication. Mobile articulated arm for pick and place operation 2DOF articulated arm on a three wheeled omni-directional platform with fully autonomous capability such to identify objects in the arena and perform a pick and place operation. fun