Aditya Rauniyar
Aurora Innovation · Simulation & Autonomy
Robotics @ Carnegie Mellon University

// Robotics · AI · Simulation
I work at Aurora Innovation on simulation-driven autonomy, building the future of scalable deployment of autonomous systems.
I graduated with a Master’s in Robotics from the Robotics Institute, Carnegie Mellon University. My thesis, Towards Views for 4D Scene Understanding, focused on coordinating among autonomous agents with perceptual negotiation in the human world.
During my time at CMU, I led the Reidentification team for the DARPA Triage Challenge as part of Team Chiron, and co-developed AirStack — a modular autonomy stack with closed-loop simulation for embodied AI.
My research was influenced by Prof. Sebastian Scherer (pioneer of field robotics) and Prof. Katia Sycara (pioneer of advanced agents).
Send me an email for a chat!
-
 DARPA Triage Challenge: Multi-Robot Perception for Subject Localization2025Multi-robot system that collaboratively detects, tracks, and localizes subjects by sharing geolocation data with a central ground station, enabling consistent re-identification across the fleet.
DARPA Triage Challenge: Multi-Robot Perception for Subject Localization2025Multi-robot system that collaboratively detects, tracks, and localizes subjects by sharing geolocation data with a central ground station, enabling consistent re-identification across the fleet. -
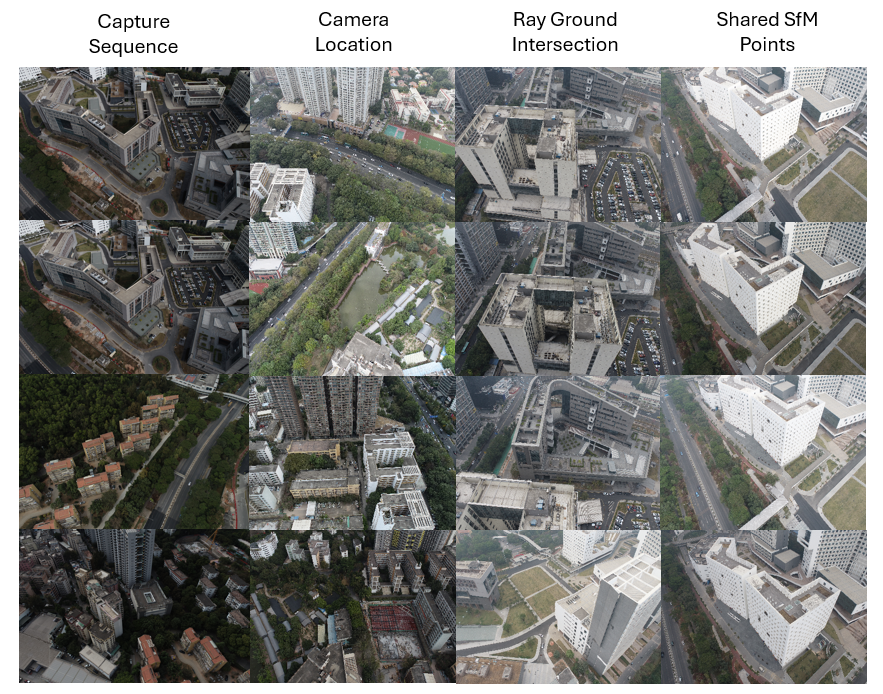
 Active Vision for Next Best View Planning in Outdoor ScenesOct 2023Uncertainty guided next best view prediction in outdoor scene settings.
Active Vision for Next Best View Planning in Outdoor ScenesOct 2023Uncertainty guided next best view prediction in outdoor scene settings. -
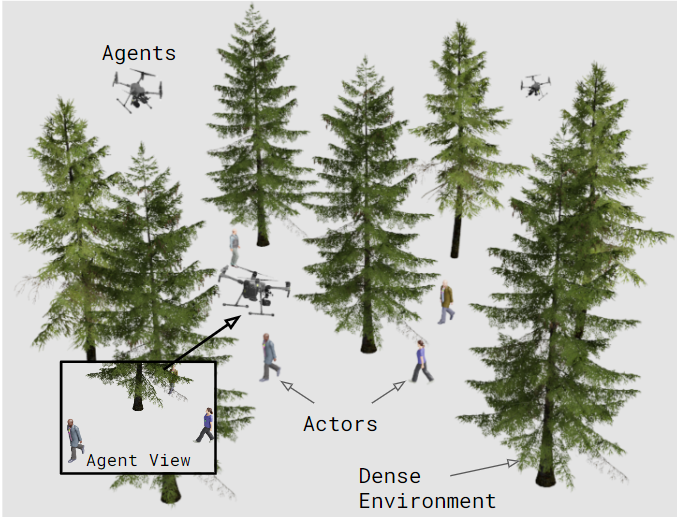
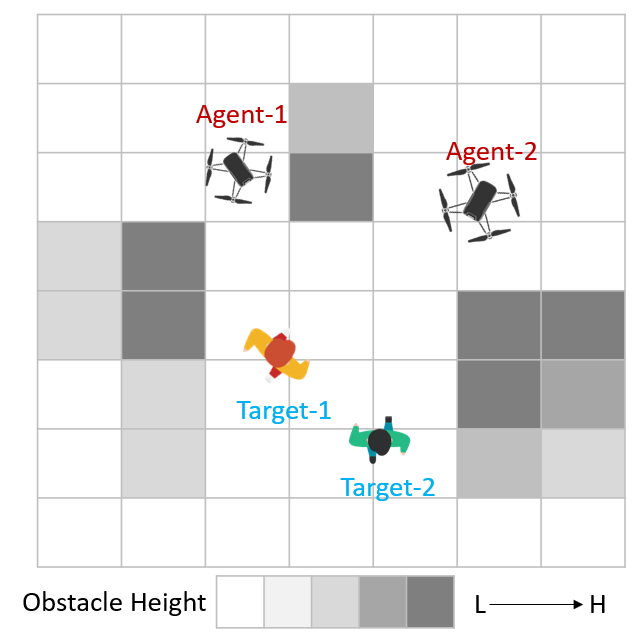 Learning to Select Multi-Viewpoints for Filming Dynamic TargetsOct 2023We use SARSA and Q-Learning to safely select viewpoints over a trajectory to capture most informative poses across multiple views to maximize pixel coverage over moving targets.
Learning to Select Multi-Viewpoints for Filming Dynamic TargetsOct 2023We use SARSA and Q-Learning to safely select viewpoints over a trajectory to capture most informative poses across multiple views to maximize pixel coverage over moving targets. -
 MeWBots: Mecanum-wheeled robots for collaborative manipulation in an obstacle-clustered environment without communicationSpringer’s Journal of Intelligent & Robotic Systems, Oct 2021
MeWBots: Mecanum-wheeled robots for collaborative manipulation in an obstacle-clustered environment without communicationSpringer’s Journal of Intelligent & Robotic Systems, Oct 2021 -
 Design Model for the Drive and Actuator of the Test Set-Up of a Novel Flexible Robotic SystemIn 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Oct 2018
Design Model for the Drive and Actuator of the Test Set-Up of a Novel Flexible Robotic SystemIn 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Oct 2018 -
 Autonomous Mobile Articulated Arm for Pick and Place OperationOct 20182DOF articulated arm on a three wheeled omni-directional platform with fully autonomous capability to identify objects in the arena and perform pick and place operations. Won bronze at World Robot Olympiad.
Autonomous Mobile Articulated Arm for Pick and Place OperationOct 20182DOF articulated arm on a three wheeled omni-directional platform with fully autonomous capability to identify objects in the arena and perform pick and place operations. Won bronze at World Robot Olympiad.
RISS: Research Showcase
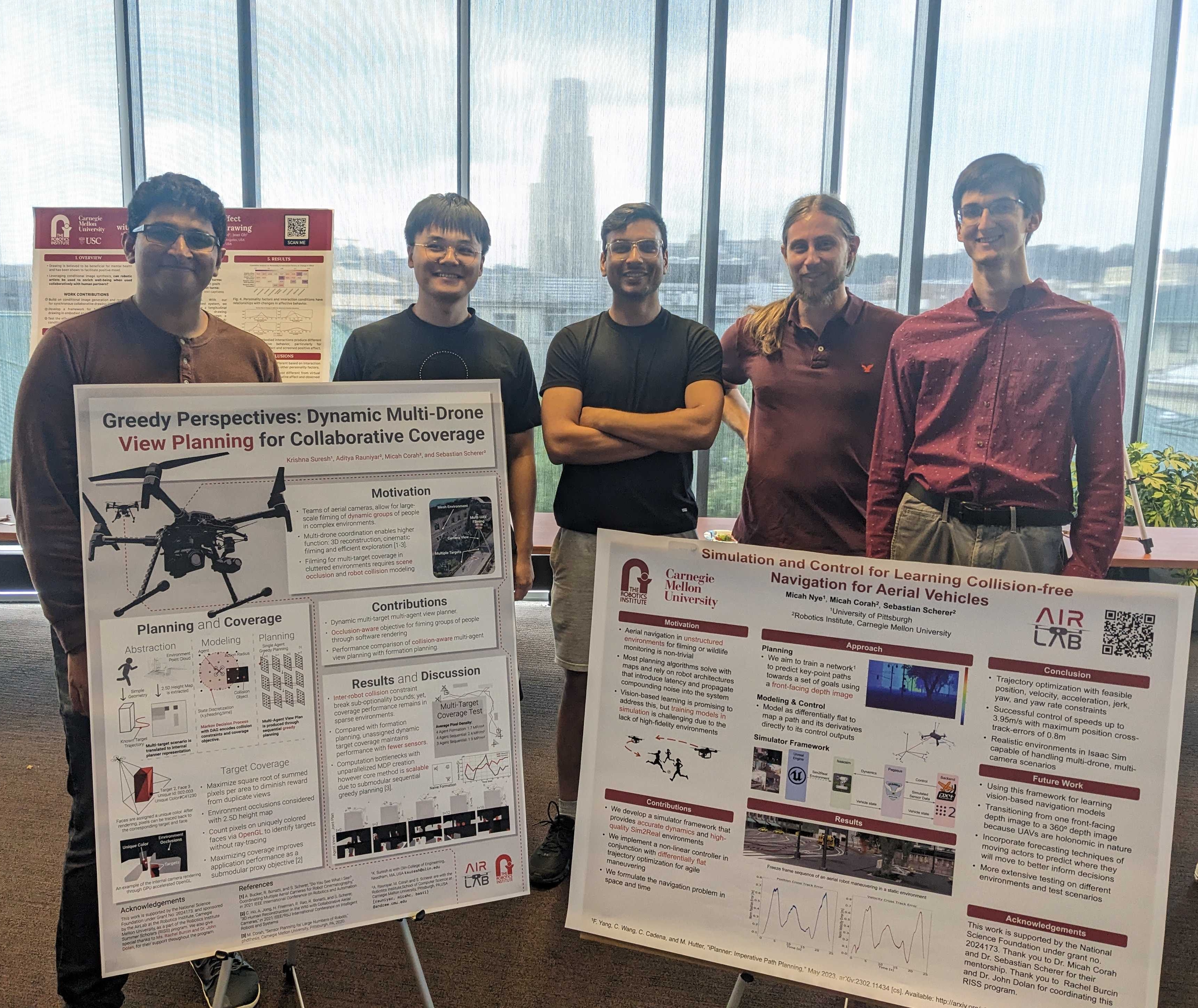
Aug 2023: Worked with Krishna Suresh and Micah Nye as part of their RISS program in the multi-drone project advised by Prof. Sebastian and Micah Corah. I mentored Krishna in the project and we made 1 IROS 2023 Workshop paper and 1 ICRA 2024 Submission, both me as 2nd author. (Me in center)
GSA: Soccer League
Aug 2023: Friendly soccer league organized by Graduate Student Assembly at CMU. I was part of the "Robotics Institute Football Club". We ended up winning the tournament. I played as Striker and was team's top scorer. (Me in lower-left)


Trek to Mt. Annapurna Base Camp
May 2023: Trekked Mt. Annapurna Base Camp in the Himalayas. Total duration: 7 days. Max Altitude: 4300m.
World Robot Olympiad: Robotics Competition
Sept 2018: Participated in the World Robots Olympiad Advance Robotics Challenge. We won bronze. I led the design, simulation and validation of the autonomous robot team.

ABU Robocon: Robotics Competition
May 2017 & 2018: Competed in Asia's biggest robotics competition where 150+ teams participated in India. We ended in top 15 in 2017. I led the prototype that represented the university team. (Me just left of the center robot)
Representing Nation in U19 International
Jan 2013: Participated in the International School Cricket Premier Leagues, representing Nepal and playing against India (Loss) and Kuwait (Win). I secured the second-highest score with the highest run-rate in our match against Kuwait.
