publications
publications by categories in reversed chronological order.
2025
-
 DARPA Triage Challenge: Multi-Robot Perception for Subject Localization2025Multi-robot system that collaboratively detects, tracks, and localizes subjects by sharing geolocation data with a central ground station, enabling consistent re-identification across the fleet.
DARPA Triage Challenge: Multi-Robot Perception for Subject Localization2025Multi-robot system that collaboratively detects, tracks, and localizes subjects by sharing geolocation data with a central ground station, enabling consistent re-identification across the fleet.
2024
2023
-
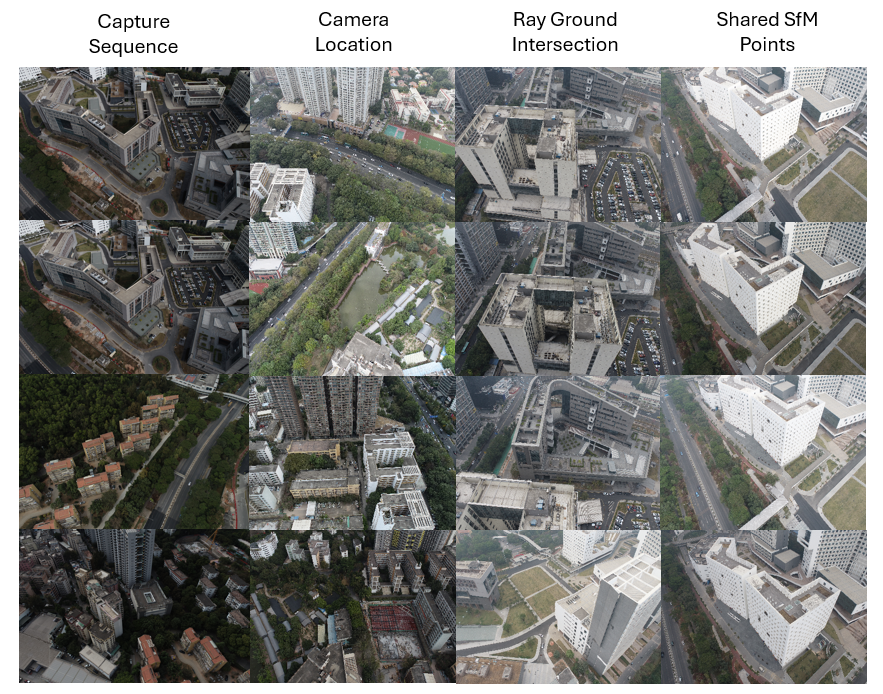
 Active Vision for Next Best View Planning in Outdoor ScenesOct 2023Uncertainty guided next best view prediction in outdoor scene settings.
Active Vision for Next Best View Planning in Outdoor ScenesOct 2023Uncertainty guided next best view prediction in outdoor scene settings. -
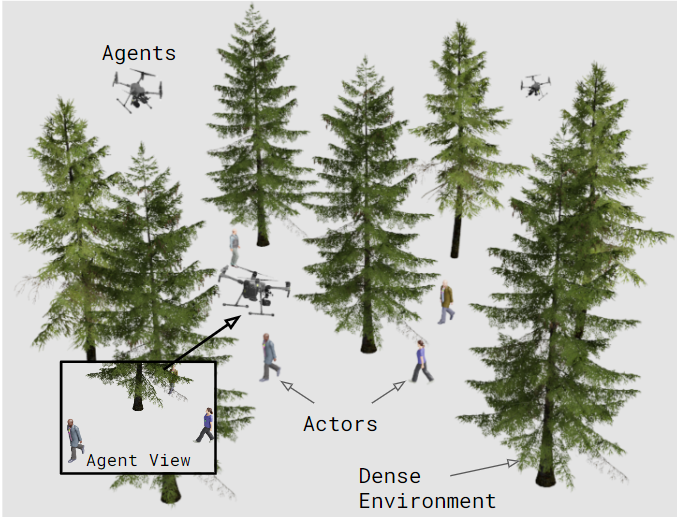
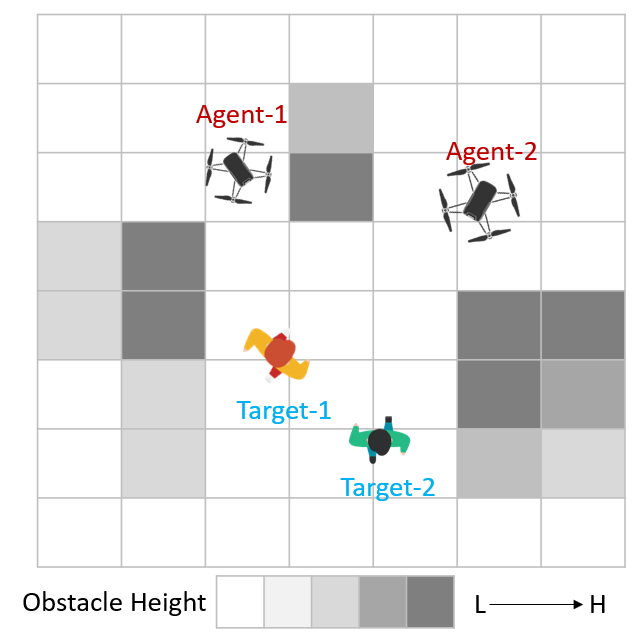 Learning to Select Multi-Viewpoints for Filming Dynamic TargetsOct 2023We use SARSA and Q-Learning to safely select viewpoints over a trajectory to capture most informative poses across multiple views to maximize pixel coverage over moving targets.
Learning to Select Multi-Viewpoints for Filming Dynamic TargetsOct 2023We use SARSA and Q-Learning to safely select viewpoints over a trajectory to capture most informative poses across multiple views to maximize pixel coverage over moving targets.
2021
-
 MeWBots: Mecanum-wheeled robots for collaborative manipulation in an obstacle-clustered environment without communicationSpringer’s Journal of Intelligent & Robotic Systems, Oct 2021
MeWBots: Mecanum-wheeled robots for collaborative manipulation in an obstacle-clustered environment without communicationSpringer’s Journal of Intelligent & Robotic Systems, Oct 2021
2018
-
 Design Model for the Drive and Actuator of the Test Set-Up of a Novel Flexible Robotic SystemIn 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Oct 2018
Design Model for the Drive and Actuator of the Test Set-Up of a Novel Flexible Robotic SystemIn 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Oct 2018 -
 Autonomous Mobile Articulated Arm for Pick and Place OperationOct 20182DOF articulated arm on a three wheeled omni-directional platform with fully autonomous capability to identify objects in the arena and perform pick and place operations. Won bronze at World Robot Olympiad.
Autonomous Mobile Articulated Arm for Pick and Place OperationOct 20182DOF articulated arm on a three wheeled omni-directional platform with fully autonomous capability to identify objects in the arena and perform pick and place operations. Won bronze at World Robot Olympiad.